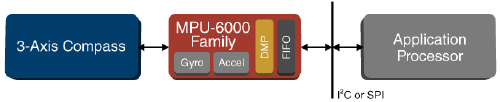
Odavno sam nabavio neke od ovih elektronskih komponenti ali nikako da nesto probam. Hoću da napravim jedan IMU (Inertial Measurement Unit) bez neke posebne potrebe. Verovatno ima već gotovih, jednostavnih i boljih rešenja pa je ovo samo zanimacija. Senzor je IvenSense MPU-6050 Six-Axis Gyro + Accelerometar. Ovaj senzor se ne preporučuje za upotrebu u novim projektima pošto je zamenjen novijom generacijom. U čipu se nalazi i Digital Motion Processor™ (DMP™) koji ne zelim da koristim iako pouzdano znam da bi rezultat bio bolji.
Evo blok šeme i testnog skolpa, samo u ovom slučaju nedostaje kompas.
I ovako nekako izgleda testna platforma, Wemos S2 Mini ESP32-S2 i GY-521 (MPU6050)

Za početak da probam bar da pročitam RAW podatke sa senzora. Datasheet za MPU-6050 i registar mapa.
import micropython, esp
from machine import Pin, SoftI2C
key = Pin(0,Pin.IN, Pin.PULL_UP) # reset taster
led = Pin(15,Pin.OUT) # on-board led
# MPU registri
ADDRESS = 0x68
ACCEL_RANGE_2G = 0x00
GYRO_RANGE_250DEG = 0x00
PWR_MGMT_1 = 0x6B
PWR_MGMT_2 = 0x6C
ACCEL_XOUT0 = 0x3B
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
ACCEL_CONFIG = 0x1C
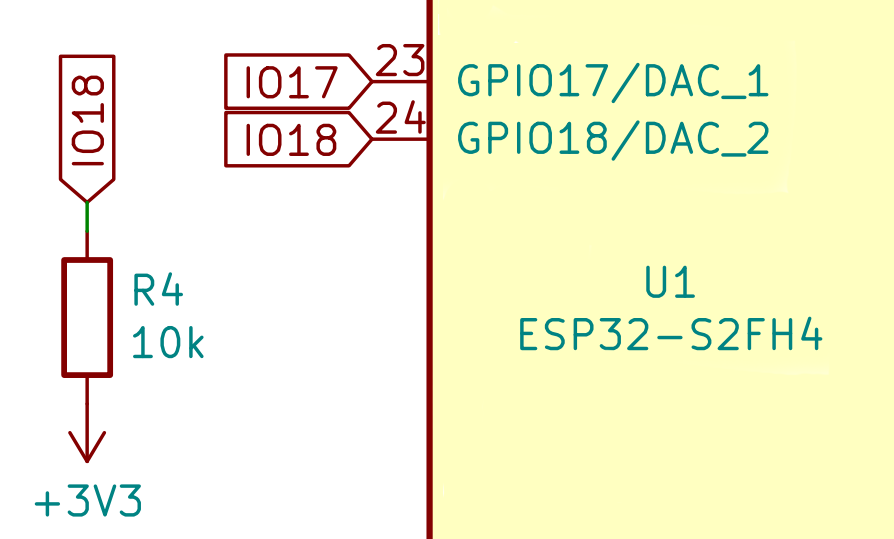
i2c = SoftI2C(scl=Pin(36), sda=Pin(38), freq=400000)
i2c.start()
i2c.writeto(ADDRESS, bytearray([PWR_MGMT_1, 0x00]))
i2c.writeto(ADDRESS, bytearray([ACCEL_CONFIG, ACCEL_RANGE_2G]))
i2c.writeto(ADDRESS, bytearray([GYRO_CONFIG, GYRO_RANGE_250DEG]))
i2c.writeto(ADDRESS, bytearray([CONFIG, 0x00]))
i2c.stop()
loop = True
led.value(1)
while loop:
i2c.start()
raw = i2c.readfrom_mem(ADDRESS, ACCEL_XOUT0, 14)
i2c.stop()
print(raw)
if key.value() == 0:
loop = False
led.value(0)
i rezultat bi trebalo da izgleda ovako, nije bas mnogo korisno ali bar znamo da radi komunikacija sa senzorom
b'\xcb\\\x02\x84\xd30\xf8`\xf1\xb5\xfc\xf7\xee\xf6'
b'\xd2\xb4\x01\x9c\xd5T\xf8p\xf0\xd9\xfc\xee\xec_'
b'\xce\xd0\x00\xec\xd3\xc0\xf8\x80\xf0\x9f\xf8\xb6\xea\x8b'
b'\xcdx\xff\\\xd9\x00\xf8\x90\xefH\xfb\x0e\xea '
b'\xcfX\x00\x88\xd5p\xf8`\xef\x8d\xf6|\xe9\x85'
b'\xcet\x00\x08\xd6|\xf8p\xef\xb2\xf3\xbf\xe9\xde'
b'\xd2T\xfe\xc0\xd6P\xf8\x80\xef\xe7\xf3e\xeb\x00'
b'\xd5\xcc\xff\xe8\xd6\xac\xf8\x90\xef\xae\xf6\xa3\xeb\x8b'
b'\xd4\xa4\x00\xd8\xd5\x84\xf8\xa0\xef]\xfa\\\xeb_'
b'\xd6L\x00l\xd6\x00\xf8\x90\xef2\xfek\xeb\\'
b'\xd3\\\x01\x84\xd3,\xf8\x80\xefO\xfe\xaf\xe9\x83'
b'\xd6<\x01\xd8\xd6h\xf8\x90\xeds\x05\xcf\xe7\xd9'
i sve zajedno i za buduce postove moze da se nadje ovde
hajde da probam da MPU6050 generise interapt i da u interapt rutini citam podatke sa senzora. izpacio sam i print(raw) da bih izmeriovremei i stabilnost uzorkovanja.
INT_ENABLE = 0x38
interrupt_pin = Pin(40, Pin.IN, Pin.PULL_UP) # Connect INT pin from MPU6050 to GPIO40
# Variable to track interrupt handling
handle_interrupts = True
# Interrupt handler
def handle_interrupt(pin):
global handle_interrupts
if handle_interrupts:
i2c.start()
raw = i2c.readfrom_mem(ADDRESS, ACCEL_XOUT0, 14)
i2c.stop()
# do something
# Attach interrupt
interrupt_pin.irq(trigger=Pin.IRQ_FALLING, handler=handle_interrupt)
while True:
if key.value() == 0:
handle_interrupts = False # Stop handling interrupts
interrupt_pin.irq(handler=None) # Detach the interrupt handler
break
pokusacu da ESP32 bude Wi-Fi access point i da broadcastuje RAW podatke sa senzora pa da pokusam da od tih podataka dobijem orjentaciu na racunaru koji ih dobija.